Particle Photon - The Buddy System: Publish and Subscribe
This is a demonstration of the Photons publish and subscribe features. When the photon publishes an event to the cloud it makes that available to other devices that have subscribe to the event. The other devices is not just limited to other photons but could also be internet connected smart phones ore web browsers.
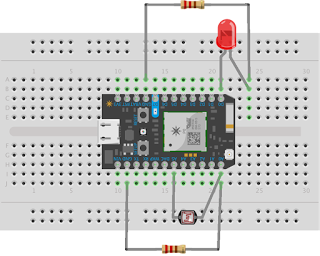
In this example two photons are wired up to have an LED shining towards a photo resistor such that when an object comes between them the photon can detect the change on the photo resister.
The sample code in the photon documentation has each photon subscribing to the others unique event. In the event handler the photon will check to see if the published event indicates the beam to be intact or broken. If the beam is intact then the on board LED connected to D7 is turned off, if the beam is broken then the LED is turned on.
The main code on each photonsimply checks the status of the beam and publishes the status to the cloud.
Notice in the video how quickly the communication takes place.
// -----------------------------------------
// Publish and Subscribe with Photoresistors
/* -----------------------------------------
Go find a buddy who also has a Particle device.
Each of you will pick a unique event name
(make it weird so that no one else will have it)
(no more that 63 ASCII characters, and no spaces)
In the following code, replace "your_unique_event_name" with your chosen name.
Replace "buddy_unique_event_name" with your buddy's chosen name.
Have your buddy do the same on his or her IDE.
Then, each of you should flash the code to your device.
Breaking the beam on one device will turn on the D7 LED on the second device.
But how does this magic work? Through the miracle of publish and subscribe.
We are going to Particle.publish a public event to the cloud.
That means that everyone can see you event and anyone can subscribe to it.
You and your buddy will both publish an event, and listen for each others events.
------------------------------------------*/
int led = D0;
int boardLed = D7;
int photoresistor = A0;
int power = A5;
int intactValue;
int brokenValue;
int beamThreshold;
bool beamBroken = false;
// We start with the setup function.
void setup() {
// This part is mostly the same:
pinMode(led,OUTPUT); // Our LED pin is output (lighting up the LED)
pinMode(boardLed,OUTPUT); // Our on-board LED is output as well
pinMode(photoresistor,INPUT); // Our photoresistor pin is input (reading the photoresistor)
pinMode(power,OUTPUT); // The pin powering the photoresistor is output (sending out consistent power)
// Here we are going to subscribe to your buddy's event using Particle.subscribe
Particle.subscribe("buddy_unique_event_name", myHandler);
// Subscribe will listen for the event buddy_unique_event_name and, when it finds it, will run the function myHandler()
// (Remember to replace buddy_unique_event_name with your buddy's actual unique event name that they have in their firmware.)
// myHandler() is declared later in this app.
// Next, write the power of the photoresistor to be the maximum possible, which is 4095 in analog.
analogWrite(power,4095);
// Since everyone sets up their leds differently, we are also going to start by calibrating our photoresistor.
// This one is going to require some input from the user!
// Calibrate:
// First, the D7 LED will go on to tell you to put your hand in front of the beam.
digitalWrite(boardLed,HIGH);
delay(2000);
// Then, the D7 LED will go off and the LED will turn on.
digitalWrite(boardLed,LOW);
digitalWrite(led,HIGH);
delay(500);
// Now we'll take some readings...
int off_1 = analogRead(photoresistor); // read photoresistor
delay(200); // wait 200 milliseconds
int off_2 = analogRead(photoresistor); // read photoresistor
delay(1000); // wait 1 second
// Now flash to let us know that you've taken the readings...
digitalWrite(boardLed,HIGH);
delay(100);
digitalWrite(boardLed,LOW);
delay(100);
digitalWrite(boardLed,HIGH);
delay(100);
digitalWrite(boardLed,LOW);
delay(100);
// Now the D7 LED will go on to tell you to remove your hand...
digitalWrite(boardLed,HIGH);
delay(2000);
// The D7 LED will turn off...
digitalWrite(boardLed,LOW);
// ...And we will take two more readings.
int on_1 = analogRead(photoresistor); // read photoresistor
delay(200); // wait 200 milliseconds
int on_2 = analogRead(photoresistor); // read photoresistor
delay(300); // wait 300 milliseconds
// Now flash the D7 LED on and off three times to let us know that we're ready to go!
digitalWrite(boardLed,HIGH);
delay(100);
digitalWrite(boardLed,LOW);
delay(100);
digitalWrite(boardLed,HIGH);
delay(100);
digitalWrite(boardLed,LOW);
delay(100);
digitalWrite(boardLed,HIGH);
delay(100);
digitalWrite(boardLed,LOW);
intactValue = (on_1+on_2)/2;
brokenValue = (off_1+off_2)/2;
beamThreshold = (intactValue+brokenValue)/2;
}
void loop() {
// This loop sends a publish when the beam is broken.
if (analogRead(photoresistor)>beamThreshold) {
if (beamBroken==true) {
Particle.publish("your_unique_event_name","intact");
// publish this public event
// rename your_unique_event_name with your actual unique event name. No spaces, 63 ASCII characters.
// give your event name to your buddy and have them put it in their app.
// Set the flag to reflect the current status of the beam.
beamBroken=false;
}
}
else {
if (beamBroken==false) {
// Same deal as before...
Particle.publish("your_unique_event_name","broken");
beamBroken=true;
}
}
}
// Now for the myHandler function, which is called when the cloud tells us that our buddy's event is published.
void myHandler(const char *event, const char *data)
{
/* Particle.subscribe handlers are void functions, which means they don't return anything.
They take two variables-- the name of your event, and any data that goes along with your event.
In this case, the event will be "buddy_unique_event_name" and the data will be "intact" or "broken"
Since the input here is a char, we can't do
data=="intact"
or
data=="broken"
chars just don't play that way. Instead we're going to strcmp(), which compares two chars.
If they are the same, strcmp will return 0.
*/
if (strcmp(data,"intact")==0) {
// if your buddy's beam is intact, then turn your board LED off
digitalWrite(boardLed,LOW);
}
else if (strcmp(data,"broken")==0) {
// if your buddy's beam is broken, turn your board LED on
digitalWrite(boardLed,HIGH);
}
else {
// if the data is something else, don't do anything.
// Really the data shouldn't be anything but those two listed above.
}
}

Comments
comments powered by Disqus